本教程在 Ubuntu22.04.1 虚拟机中安装了 Xilinx 2024.1 的开发环境,基于该环境从源码编译 PYNQ 3.1.2 工程,生成能够在 ALINX AXU15EGB 开发板上运行的 PYNQ 系统镜像。

Zynq US+ MPSoC AI SFP+ 10G 光纤 FPGA 开发板AXU15EGB
AXU15EGB 开发板:
www.alinx.com/detail/261
资源链接:
https://pan.baidu.com/s/1J1KnN_z404Skze42CUj7gQ
提取码: in8s
环境配置
提示:
ubuntu、vitis 和 vivado 安装的部分可以参考 ALINX 的教程文档《course_s0_Xilinx开发环境安装教程》,虽然版本不一样,但流程基本不变;安装 2024.1 版本的 petalinux 则需要参照本教程,petalinux 的依赖库和旧版本稍有区别。
ubuntu22.04.1 安装
1. 在 vmware 中安装 ubuntu22.04.1,可以使用资源链接中提供的 ubuntu-22.04.1-desktop-amd64.iso 镜像文件,安装过程比较简单,使用 vmware 的创建虚拟机流程安装即可。(vmware 软件建议使用较新的版本,本教程中使用的是 vmware16)

需要注意的是分配给虚拟机的资源,本教程中虚拟机资源配置如图所示。其中处理器 8 个,分配内存建议至少 16GB,硬盘存储至少 500GB。主机如果是网线直连,网络适配器就配置为桥接模式,如果是使用 wifi,就配置为 NAT 模式。(请根据自身主机的配置合理分配资源。主机留给自身的内存太少会导致主机系统卡顿甚至卡死)
进入 ubuntu22.04.1 系统,打开 Software & Updates,切换软件源为阿里云的软件源

选择 Updates,将更新自检改为 Never,为了保证环境稳定,我们不会更新系统版本。(如果系统主动弹出更新提示的窗口,建议也不要更新,直接关闭窗口)

打开一个命令行终端,输入命令,选择“No”,回车确认。这一步是将 ubuntu 默认的 shell 从 dash 改为 bash
sudo dpkg-reconfigure dash

在 ubuntu 的 Settings 中,选择 Privacy->Screen,将锁屏时间取消

Petalinux 2024.1安装
在 ubuntu 中打开一个命令行终端,输入命令,更新软件源
sudo apt-get update
输入命令,安装 petalinux 的依赖项
sudo apt-get install iproute2 gawk python3 python2 build-essential gcc git make net-tools libncurses5-dev tftpd zlib1g-dev libssl-dev flex bison libselinux1 gnupg wget git-core diffstat chrpath socat xterm autoconf libtool tar unzip texinfo zlib1g-dev gcc-multilib automake zlib1g:i386 screen pax gzip cpio python3-pip python3-pexpect xz-utils debianutils iputils-ping python3-git python3-jinja2 libegl1-mesa libsdl1.2-dev pylint
输入命令,准备 petalinux 的安装目录(注意,这里的 alinx 需要替换成自己的用户名)
sudo mkdir -p /opt/pkg/petalinux sudo chown alinx:alinx /opt/pkg/petalinux
将资源链接提供的 petalinux2024.1 安装包拷贝到 ubuntu 中,本教程拷贝到 Downloads 目录下

在 Downloads 目录下打开终端,输入如下命令,安装 petalinux。此时会出现让你查看协议的提示,按回车查看协议内容,按 q 退出协议内容,按 y 同意协议内容
chmod 755 ./petalinux-v2024.1-05202009-installer.run ./petalinux-v2024.1-05202009-installer.run -d /opt/pkg/petalinux/
安装完成后,在当前终端输入命令,测试 petalinux 环境变量配置(注意,环境变量配置只在当前终端中生效,如果打开另一个终端,需要重新配置 petalinux 环境变量)
source /opt/pkg/petalinux/settings.sh

Vivado 和 Vitis 2024.1 安装
在 ubuntu 中解压资源链接提供的 vitis 的安装压缩包
进入解压后的目录,打开终端,输入命令,运行依赖库检测脚本
sudo ./installLibs.sh
输入命令,添加执行权限,运行安装程序
sudo chmod +x xsetup
安装完成后,输入命令,修改安装目录的权限
sudo chmod 777 -R /tools/Xilinx/
输入命令,配置 vivado 环境变量,并打开 vivado(vivado 环境变量配置也仅在当前终端中生效)
source /tools/Xilinx/Vivado/2024.1/settings64.sh vivado&
软件启动后,在“Help → Manage license…”中添加 license 文件
输入命令,安装下载器驱动
cd /tools/Xilinx/Vivado/2024.1/data/xicom/cable_drivers/lin64/install_script/install_drivers/ sudo ./install_drivers
Vivado 工程参照 ALINX 教程文档 course_s2_ALINX_ZYNQ_MPSoC 开发平台 Vitis 应用教程“第一章 体验 ARM,裸机输出Hello World”中搭建 vivado 工程的部分,搭建基础的 ps_hello vivado 工程,ZYNQ Processor IP 配置已在该章节详述。完善介绍其余部分配置介绍:
启用 PL Fabric Clocks 勾选,这里预设置四个时钟频率。


Slave Interface 配置
在 PS-PL Configuration 窗口,配置 AXI HP, 勾选 AXI HP0 FPD 和 AXI HP1 FPD 设置数据位宽为 128,外连到 AXI_Interconnect_1 的 Master AXI port 以此数据位宽越大越好。

Master Interface 配置
同样在该窗口勾选 AXI HPM0 LPD 并配置数据位宽为 32

Interrupts 配置
在中断栏里启用中断请求 IRQ0, IRQ1。

其端口位宽自动是 7 也与外连端口自适应,中断敏感是上升沿。预留终端请求 0,连接 1。


GPIO EMIO 配置
在 I/O 配置栏中勾选 GPIO EMIO, MPSoC 器件最大可选 95。

将 I2C 1 设置成 EMIO 用于连接摄像头

同样勾选 UART 1 设置成 emio 类型导出引脚连接 PL 侧 UART

ALINX 向广大用户提供文档时也将出厂测试的 Vivado 工程及镜像。这篇文档是基于此工程实现,接下来介绍工程实现。
总览:工程内基于 AXU15EGB 外设接口应用众多 AMD IP 以及 ALINX IP 实现检测办法。
添加 MIPI CSI-2 Rx subsystem 模块,用于 MIPI 数据的接收和解析,转成 axi-stream 接口。配置如下,数据格式选择 YUV422, 选择 2 lane,Line Rate 配置为 1000Mbps,指的是最大支持的速率,也可以根据自己的需求填写,范围为 80-2500;Pixels Per Clock 默认配置为 1,表示 1 个周期为 1 个像素;这里配置为 2。

Shared Logic 选择“include Shared Logic in core”

Pin Assignment 根据原理图按照以下配置。

添加 subset 模块
调整图像数据顺序,因为经过实际操作发现,图像的 YUV 数据顺序需要调整。

添加 Video Processing Subsystem 模块
Sample Per Clock设置 2,Maximum Data Width:8;Maximum Number of Pixels:1920;Maximum Number of lines: 1080 再选择Color Space Conversion Only 并勾选 RGB | YUV 4:4:4 | YUV 4:2:2

添加 Video Frame Buffer Write 模块
这个 IP 类似于 VDMA IP, 将流接口转成 AXI, 按照如下配置。

添加 AXI_Ethernet 模块
在 Physical Interface 栏勾选 1Gbps,Physical Interface Selection 选 RGMII

Mac Features 里选择 4k

添加两个 AXI_UART16550 模块
PL 系统时钟是 200MHz
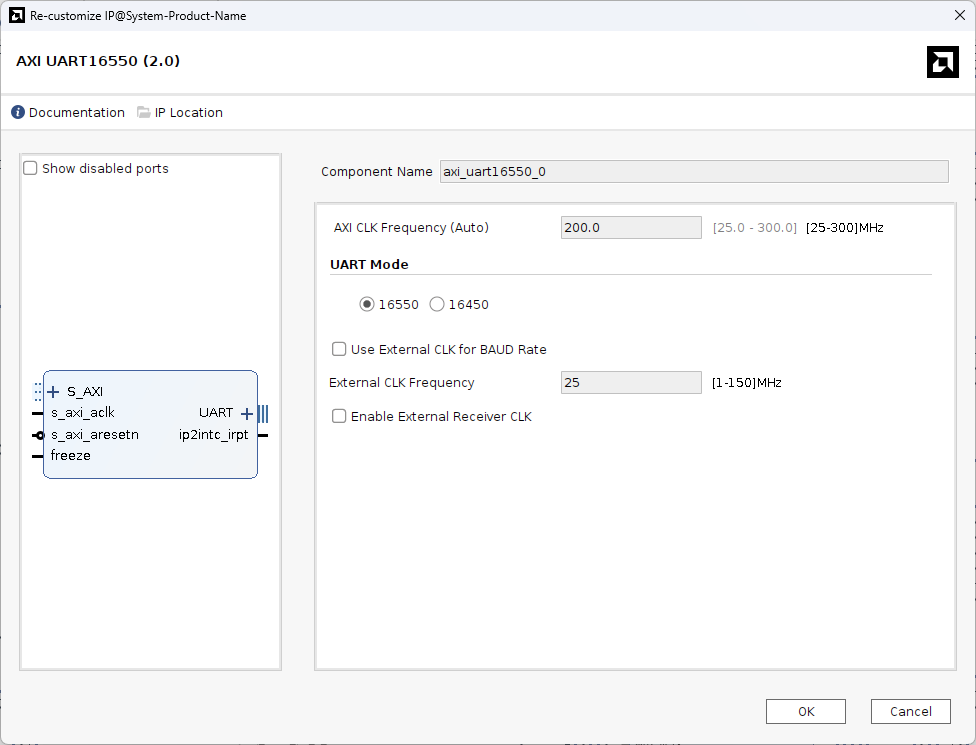
导出引脚,外接两个 RS485 外设。

添加后续几个 AXI_GPIO 模块控制 PL 端按键和 LED

Extender 模块是 ALINX 的检测 FMC 以及 40 pin 扩展口上引脚的代码模块,这里的 17 对引脚是 40pin 扩展口上引脚两两环通做测试,需要用到 ALINX 内部测试模块。

最后使用 AXI_Interconnect 模块将以上 16 个 AXI 模块连线。


(注意:ps_hello 工程中不涉及到 ps 和 pl 部分交互的接口,例如 hp 口,如果后续要在 pynq 系统中使用这部分接口,需要在这一步就将这些接口使能。移植完成的 pynq 系统中 ps 部分开放的接口和参数都是固定的,虽然基于 pynq 系统,可以任意重新配置 pl 部分,但 pl 能够和 ps 部分连接的接口在这一步就已经固定了。)
编译 vivado 工程,因为涉及 PL 侧部分导出包含 bit 流的 xsa
petalinux 工程
这部分可参考 ALINX 教程:
《course_s3_ALINX_ZYNQ_MPSoC 开发平台Linux 基础教程》“第一章 使用 Petalinux 定制 Linux 系统” 和 “第八章 SD 卡根文件系统”
使用上一章节导出的 xsa 搭建 petalinux 工程
设置离线编译和 sd 卡根文件系统
在设备树文件 system-user.dtsi 中修改成如下所示
/include/ "system-conf.dtsi"
/ {
clock_ref_pcie:clk100 {
compatible = "fixed-clock";
#clock-cells = < 0 >;
clock-frequency = < 100000000 >;
};
clock_ref_usb0:clk26 {
compatible = "fixed-clock";
#clock-cells = < 0 >;
clock-frequency = < 26000000 >;
};
clock_ref_dp:clk27 {
compatible = "fixed-clock";
#clock-cells = < 0 >;
clock-frequency = < 27000000 >;
};
};
&psgtr {
/* nc, sata, usb3, dp */
clocks = < &clock_ref_pcie >, < &clock_ref_usb0 >, < &clock_ref_dp >;
clock-names = "ref0", "ref1", "ref2";
};
&qspi {
status = "okay";
flash0: flash@0 {
#address-cells = < 1 >;
#size-cells = < 1 >;
compatible ="jedec,spi-nor";
reg= < 0x0 >;
partition@0 {
label = "qspi-0";
reg = < 0x000000000x02000000 >;
};
/delete-node/ partition@1;
/delete-node/ partition@2;
};
};
/* SD */
&sdhci1 {
disable-wp;
no-1-8-v;
};
/* USB */
&dwc3_0 {
status = "okay";
dr_mode = "host";
};
如果要用到 ps 部分的 m.2 接口,测试 ssd 固态硬盘,可以输入命令打开内核配置界面,在 Device Drivers ---> NVME Support --->路径下,按 y 使能 nvme 驱动<*> NVM Express block device 后,保存配置并退出
petalinux-config -c kernel

编译 petalinux 工程,生成 linux 镜像文件(BOOT.bin、boot.scr、image.ub、rootfs.tar.gz)
制作启动系统的 sd 卡,连接板卡的 ps 网口、dp 接口。板卡插上 u 盘、ssd 固态硬盘,uart 接口连接到主机,主机上打开串口终端。

板卡上电,串口终端打印启动信息,启动信息打印完成会提示输入用户名

2024.1 版本的 petalinux 系统默认用户名是 petalinux,初次登录会提示设置密码

测试功能接口
测试 ps 网口:如果网口是连接到支持 dhcp 服务的接口或者路由器,使用 ifconfig 命令可以查看到自动分配的 ip 地址,可以使用 ping 命令实际测试一下

测试 dp 接口:由于没有配置桌面环境,dp 接口连接到的显示器会显示另一个终端界面信息

测试 usb 接口:输入命令“ dmesg |grep usb ”,可以看到识别到了对应的 usb 设备,如图可以看到我插入的金士顿的 u 盘设备

测试 m.2 接口:输入命令“ ls /dev/nvme* ”,如果存在 nvme0,则说明识别到 ssd 设备

确认 petalinux 工程生成的系统 ps 部分的功能正常后,我们需要生成 bsp 包
由于 2024.1 版本的 petalinux 工具存在的一些 bug,似乎会将工作目录错误定位到系统根目录,该版本直接打包 bsp 会出现如下报错

一种解决方法是,在 ubuntu 的根目录下创建一个 build 目录并添加访问权限,用于通过 bsp 打包的过程检测,最终打包文件不受影响
sudo mkdir -p /build sudo chmod 777 /build
sudo mkdir -p /build最后成功打包生成 bsp

pynq 工程
在 home 目录下打开终端,输入命令,创建 pynq 的工作目录
mkdir -p /home/alinx/Projects/pynq
输入命令,切换到工作目录,下载 pynq 工程
cd /home/alinx/Projects/pynq git clone https://github.com/Xilinx/PYNQ.git
输入命令,运行 pynq 的环境配置脚本(该脚本只需要执行一次)
cd /home/alinx/Projects/pynq/PYNQ/sdbuild/scripts ./setup_host.sh
在 /home/alinx/Projects/pynq/PYNQ/boards 目录下创建一个新目录 AXU15EGB,用于存放对应开发板的配置文件,将之前 petalinux 工程生成的 petalinux.bsp 文件拷贝到该目录下

输入命令,创建并打开一个配置文件 AXU15EGB.spec
touch AXU15EGB.spec gedit AXU15EGB.spec
touch AXU15EGB.spec修改 AXU15EGB.spec 文件内容如下
ARCH_AXU15EGB := aarch64 BSP_AXU15EGB := petalinux.bsp #BITSTREAM_AXU15EGB := base/base.bit FPGA_MANAGER_AXU15EGB := 1 STAGE4_PACKAGES_AXU15EGB := xrt pynq ethernet pynq_peripherals
由于 AXU15EGB 板卡上 mmc0 设备对应的是 emmc,mmc1 对应的是 sd 卡
我们现在需要使用 sd 卡启动,所以需要将 /PYNQ/sdbuild/boot/meta-pynq/recipes-bsp/device-tree/files/pynq_bootargs.dtsi 文件中的 mmcblk0p2 改为 mmcblk1p2
将资源链接提供的三个预编译文件拷贝到 /PYNQ/sdbuild/prebuilt 目录下


输入命令,切换到 sdbuild 目录,配置 vitis 和 petalinux 的环境变量,编译 pynq 工程,编译过程中会有几次需要输入用户密码。(工程编译时间较长,编译时会从 github 上下载一些资源,如果网络稳定性较差,编译可能会失败)
cd /home/alinx/Projects/pynq/PYNQ/sdbuild source /opt/pkg/petalinux/settings.sh source /tools/Xilinx/Vitis/2024.1/settings64.sh make BOARDS=AXU3EGB
如果是网络问题导致的编译失败,比如访问 github 下载某些资源失败,可以重新输入“ make BOARDS=AXU15EGB ”编译

如果是其他报错,可以考虑输入命令“ make clean ”清除编译结果,然后重新编译工程
编译成功后会在 /PYNQ/sdbuild/output 目录下生成对应板卡型号的 img 镜像文件


运行测试
将镜像文件烧写到 sd 卡
烧写后的 sd 卡在 ubuntu 中可以看到两个分区,PYNQ 分区存放启动镜像,root 分区存放根文件系统,其中 root 分区由于是 EXT4 格式,在 windows 下一般是看不到的。


在 root 分区的 /usr/local/bin/ 目录下有一个 resizefs.sh 脚本,这个脚本会在系统初次启动时被执行,用于将 root 分区扩容到当前存储设备容量上限
在该目录下打开终端,输入命令,以 root 权限编辑文件,将里面的 mmcblk0 修改为 mmcblk1,保存文件并退出
sudo gedit resizefs.sh

开发板接上 dp 接口,ps 网口,uart 接口,插入 sd 卡,上电启动
此时串口终端会打印启动信息,完成启动后会自动登录(用户名和密码都是xilinx)

在串口终端中输入 ifconfig,确定 ps 网口分配到的 ip 地址,并确保主机和开发板能够双向 ping 通

在主机中打开浏览器,在网址栏输入:开发板 ip 地址:9090 ,回车确认。输入密码:xilinx,点击 Log in


此时会远程连接开发板上运行的 pynq 系统,并进入 jupyter 界面
dma 环通读写测试
本节测试用例参考文档
https://discuss.pynq.io/t/tutorial-pynq-dma-part-1-hardware-design/3133
https://discuss.pynq.io/t/tutorial-pynq-dma-part-2-using-the-dma-from-pynq/3134
搭建 AXU15EGB 的 dma 环通测试 vivado 工程,具体可以参考资源链接提供的 dma_test vivado 工程

在 sd 卡 root 分区 /home/xilinx/jupyter_notebooks 目录下创建一个 testfile 目录
将 vivado 工程 /dma_test/dma_test.runs/impl_1 目录下的 design_1_wrapper.bit 文件和 /dma_test/dma_test.gen/sources_1/bd/design_1/hw_handoff 目录下的 design_1.hwh 文件拷贝到 testfile 目录下,将 design_1.hwh 文件改名为 design_1_wrapper.hwh,和 bit 文件保持一致
将资源链接提供的测试程序 dma_test.ipynb 拷贝到 testfile 目录下

sd 卡插到板卡中,上电启动,查看 ip 地址。主机通过浏览器远程登录 pynq 系统,可以看到我们创建的 testfile 目录

点击 testfile 目录下的 dma_test.ipynb 程序,进入程序编写和执行界面

鼠标选中第一段程序,然后点击“运行”,这一段程序的功能是重新加载 bit 流,然后输出新 bit 流中各 ip 的配置状况,可以看到 dma 测试工程中的 axi_dma ip 的配置

当第 1 段执行完成,选中框会自动移动到下一段,我们可以多次点击运行,逐步执行程序
第 2 段是查询 axi_dma ip 是否存在,如果存在则输出它的帮助信息

第 3 段创建两个 dma 收发通道实例

第 4、5、6 段申请一段内存地址 input_buffer,并填充数据

第 7 段开始 dma 传输,第 8 段先申请一段内存地址 output_buffer 并打印其中部分数据,第 9、10 段接收 dma 传输过来的数据,并打印部分数据,可以看到和发送的数据一致。

资源链接
百度网盘:
https://pan.baidu.com/s/1J1KnN_z404Skze42CUj7gQ
提取码: in8s
- 随机文章
- 热门文章
- 热评文章
- 乖宝宠物营养研究院弗列加特(上海)研发中心盛大揭幕
- 原广州军区司令员李希林上将逝世,享年94岁
- 这个春天儿子身高蹿到1米83,体重涨到78公斤 没想到中考跳绳项目发生意外
- 2024中国共享充电宝行业研究报告:行业集中度维持高位,怪兽充电稳居第一梯队
- 受下游铁水产量回升带动 双焦氛围改善
- 紧急召回!这一公司被约谈,事关电梯质量安全
- Development of emerging industries creates new job opportunities
- 习近平会见美国国务卿布林肯
- 大悦城发布2023年财报:净利润扭亏,多元业务引领稳健经营
- 超40城支持住房“以旧换新” 操作细则各不相同
- “插座”藏摄像头,男子非法销售窃照器材获刑
- 未婚未育的90后开始抢着当月嫂,能少走20年弯路吗?
- 人民银行北京市分行:3月末北京制造业中长期贷款余额同比增长29.2%
- 1“赛事+”提升城市“流量” 陕西商洛拓经济发展新“赛道”
- 2“五一”临近 持基过节的投资者要注意这几点
- 3华发股份:成功入选“人民优选”品牌 五一黄金周热销30亿
- 4到2027年产业规模达到2000亿元 浙江发布历史经典产业高质量发展计划
- 5钟鼓楼老街区的古都新事
- 6非常危险!女子摔成粉碎性骨折!又是因为洞洞鞋,夏天多人中招……
- 7金税四期试点上线,财税体制改革拉开帷幕!或有资金借道信创ETF基金(562030)逢跌进场布局
- 8IDC:24Q1全球PC出货量恢复增长 达到疫情前水平
- 9初步数据:我国一季度经常账户顺差392亿美元
- 10“发现山西之美”TDC旅游发现者大会举办:共话文旅新生态 邀客体验新玩法
- 11国门“夫妻档” 国庆共坚守
- 12北交所一周审核动态:2家企业更新进展 胜业电气二轮问询回复中称家电头部客户对价格敏感度较低
- 13甘肃白银县域经济:从“一枝独秀”到“多点开花”
- 1大裁员下,特斯拉两名顶级高管离职
- 2奇瑞将与欧洲高端品牌签署技术平台授权协议
- 32024中国长三角青年企业家交流大会在杭州举办
- 4雷克萨斯GX中东版 全部在售 2023款 2022款 2020款 2019款 2018款成都远卓名车雷克萨斯GX中东版团购钜惠20万 欢迎上门试驾
- 5零跑C16将搭载中创新航磷酸铁锂电池
- 6Q1净利微增7%,宁德时代股东总数较2023年年末减少10728户
- 7哪吒,需要背水一战
- 8“新”中有“机”!创新服务承接新流量 撬动消费升级
- 9非创始版SU7何时交付 小米:工厂生产爬坡 全力提高产能
- 10央媒评卧铺挂帘:谁买的票谁做主
- 11江西南昌首部“多规合一”国土空间总体规划获批
- 12方程豹旗舰硬派越野!豹8正式亮相:仰望U8“青春版”登场
- 13583家族/造型霸气 方程豹豹8量产版发布