1. 本文介绍
1.1 ROS2简介
ROS是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递,以及包管理。在某些方面ROS相当于一种“机器人框架(robot frameworks)”。
1.2 ROS2与ROS1的区别
ROS2作为ROS1的继任者,在保持ROS核心功能的基础上进行了诸多改进和优化。相较于ROS1,ROS2取消了ROS1中的Master 中央节点,实现了节点的分布式发现、发布/订阅、请求/响应通讯。ROS1使用自定义的中间件(roscore),而ROS2使用DDS中间件。ROS1使用catkin作为构建系统,而ROS2使用colcon作为构建系统
2. ROS2安装
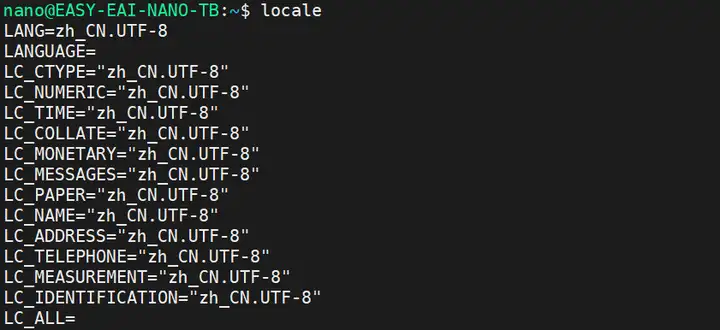
2.1 设置locale
# 安装locales
locale # check for UTF-8
sudo apt update && sudo apt install locales
# 配置locales
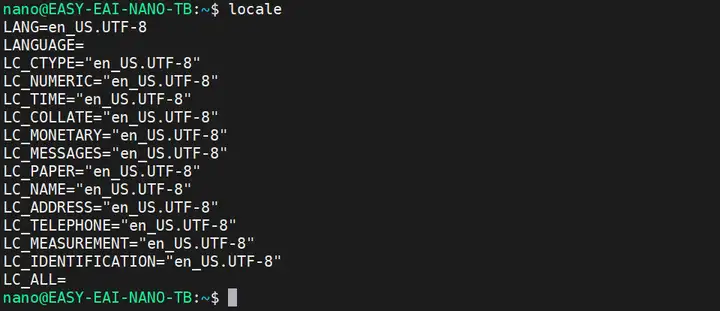
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8 export LANG=en_US.UTF-8

locale # verify settings
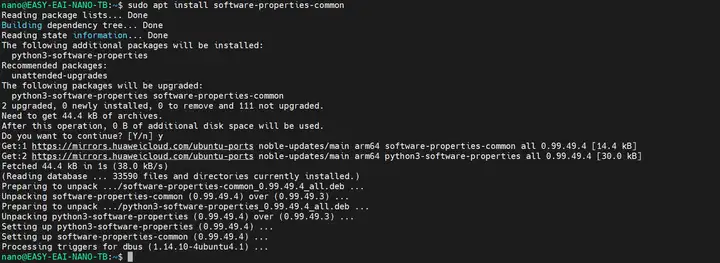
2.2 设置源
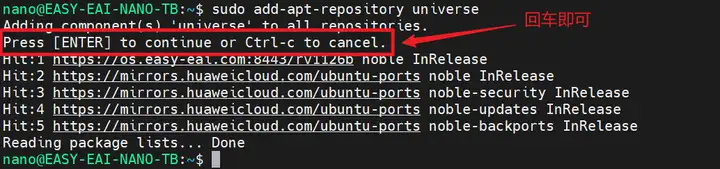
sudo apt install software-properties-common
sudo add-apt-repository universe
# 安装curl库
sudo apt install curl -y
# 添加环境变量
export ROS_APT_SOURCE_VERSION=$(curl -s https://api.github.com/repos/ros-infrastructure/ros-apt-source/releases/latest | grep -F "tag_name" | awk -F'"' '{print $4}')
# 安装补丁包
curl -L -o /tmp/ros2-apt-source.deb "https://github.com/ros-infrastructure/ros-apt-source/releases/download/${ROS_APT_SOURCE_VERSION}/ros2-apt-source_${ROS_APT_SOURCE_VERSION}.$(. /etc/os-release && echo ${UBUNTU_CODENAME:-${VERSION_CODENAME}})_all.deb"

# 解包
sudo dpkg -i /tmp/ros2-apt-source.deb

2.3 安装
# 更新和升级新源的库
sudo apt update && sudo apt upgrade
两个版本:
(1)Desktop版(推荐):ROS, RViz, demos, tutorials
(2)Base版:Communication libraries, message packages, command line tools. No GUI tools
sudo apt install ros-humble-desktop
# 安装开发工具(可选)
sudo apt install ros-dev-tools
# 设置环境
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc source ~/.bashrc
3. 测试ROS2
3.1 远程控制桌面系统
安装桌面系统,详情请查看《应用笔记/安装桌面系统》
安装完毕后,在MobaXterm运行xfce桌面端:
startxfce4
3.2 ROS2测试
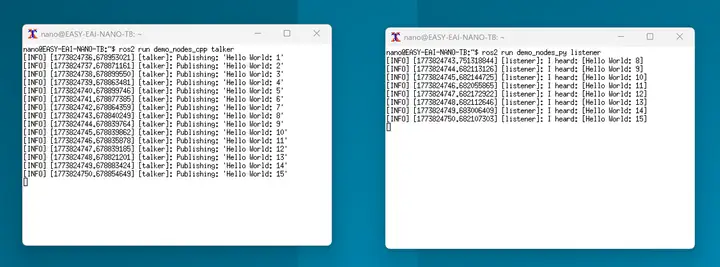
(1)发布和订阅测试:
打开一个终端,运行:
ros2 run demo_nodes_cpp talker
再打开一个新终端,运行:
ros2 run demo_nodes_py listener
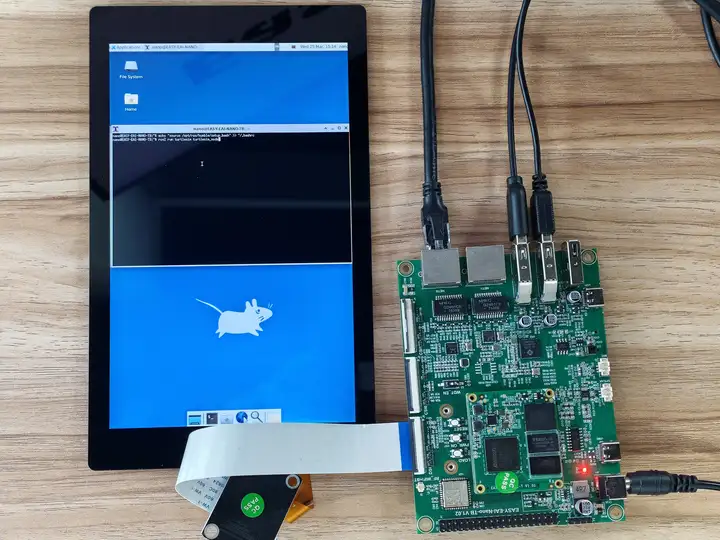
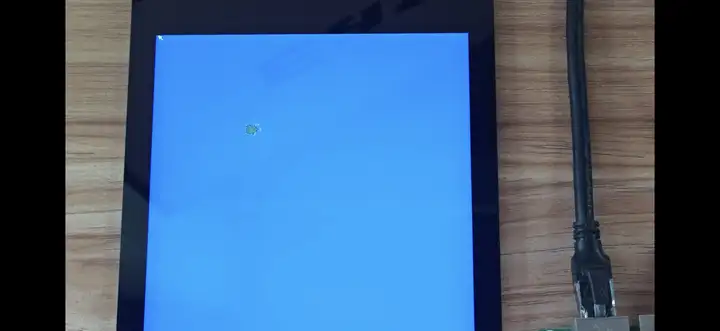
(2)小海龟测试
接上8寸屏和鼠标键盘,启动终端运行:
ros2 run turtlesim turtlesim_node
想用键盘控制小海龟旋转,新开一个终端,运行:
ros2 run turtlesim turtle_teleop_key
- 随机文章
- 热门文章
- 热评文章
- 白银被强烈看涨,黄金看跌情绪加剧
- 交易员:若失守这一点位,金价或跌向2200
- 华林证券净利降九成,屡遭监管暴露内控缺陷
- 个人养老金制度落地两周年:开户营销战持续 投资者缴存热情淡
- 新闻多一点|民主村的城市更新样本
- 清华大学经管学院院长白重恩:保险怎么更好地服务养老?任何一个国家养老都是一个难题 牵涉每个百姓
- 无碍阅读 “听见”书香 视障阅读马拉松火热“开跑”
- 债基一季度强势"吸金",多只规模大增超10倍
- 今晚强势返场!杭州人早点回家!阳光你真的不考虑销假吗?
- 商务部:有关“产能过剩”的炒作毫无道理,中方坚决反对
- 机构看好行情震荡上行,出口、TMT、高端制造等景气方向或存机会
- 上海农商行2023年营收、归母净利实现双增长
- 中国驻菲律宾使馆发言人就4月30日菲方船只非法侵闯黄岩岛答记者问
- 1“赛事+”提升城市“流量” 陕西商洛拓经济发展新“赛道”
- 2“五一”临近 持基过节的投资者要注意这几点
- 3华发股份:成功入选“人民优选”品牌 五一黄金周热销30亿
- 4到2027年产业规模达到2000亿元 浙江发布历史经典产业高质量发展计划
- 5钟鼓楼老街区的古都新事
- 6非常危险!女子摔成粉碎性骨折!又是因为洞洞鞋,夏天多人中招……
- 7金税四期试点上线,财税体制改革拉开帷幕!或有资金借道信创ETF基金(562030)逢跌进场布局
- 8IDC:24Q1全球PC出货量恢复增长 达到疫情前水平
- 9初步数据:我国一季度经常账户顺差392亿美元
- 10“发现山西之美”TDC旅游发现者大会举办:共话文旅新生态 邀客体验新玩法
- 11国门“夫妻档” 国庆共坚守
- 12北交所一周审核动态:2家企业更新进展 胜业电气二轮问询回复中称家电头部客户对价格敏感度较低
- 13甘肃白银县域经济:从“一枝独秀”到“多点开花”
- 1大裁员下,特斯拉两名顶级高管离职
- 2奇瑞将与欧洲高端品牌签署技术平台授权协议
- 32024中国长三角青年企业家交流大会在杭州举办
- 4雷克萨斯GX中东版 全部在售 2023款 2022款 2020款 2019款 2018款成都远卓名车雷克萨斯GX中东版团购钜惠20万 欢迎上门试驾
- 5零跑C16将搭载中创新航磷酸铁锂电池
- 6Q1净利微增7%,宁德时代股东总数较2023年年末减少10728户
- 7哪吒,需要背水一战
- 8“新”中有“机”!创新服务承接新流量 撬动消费升级
- 9非创始版SU7何时交付 小米:工厂生产爬坡 全力提高产能
- 10央媒评卧铺挂帘:谁买的票谁做主
- 11江西南昌首部“多规合一”国土空间总体规划获批
- 12方程豹旗舰硬派越野!豹8正式亮相:仰望U8“青春版”登场
- 13583家族/造型霸气 方程豹豹8量产版发布